Multientity Registration of Point Clouds for Dynamic Objects on Complex Floating Platform Using Object Silhouettes
Jan 1, 2020·
 ,
,
,
,
,
,
·
0 min read
,
,
,
,
,
,
·
0 min read
Feng Wang
Han Hu
Xuming Ge
Bo Xu
Ruofei Zhong
Yulin Ding
Xiao Xie
Qing Zhu*;
Abstract
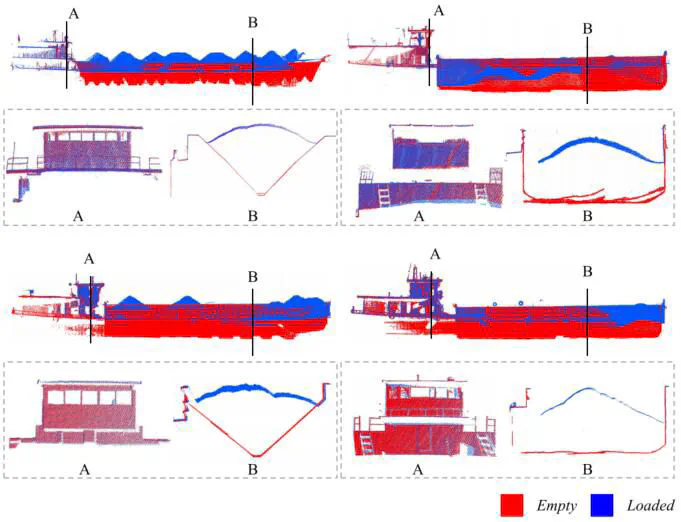
This article is focused on a challenging topic emerging from the registration of point clouds, specifically the registration of dynamic objects with low overlapping ratio. This problem is especially difficult when the static scanner is installed on a floating platform, and the objects it scans are also floating. These issues make most of the automatic registration methods and software solutions invalid. To solve this problem, explicit exploration of the static region is necessary for both the coarse and fine registration steps. Fortunately, determining the corresponding regions can be eased by the intuitive realization that in urban environments, natural objects neither present straight boundaries nor stack vertically. This intuition has guided the authors to develop a robust approach for the detection of static regions using planar structures. Then, silhouettes of the objects are extracted from the planar structures, which assist in the determination of an SE(2) transformation in the horizontal direction by a novel line matching method. The silhouettes also enable identification of the correspondences of planes in the step of fine registration using a variant of the iterative closest point method. Experimental evaluations using point clouds of cargo ships with different sizes and shapes reveal the robustness and efficiency of the proposed method, which gives 100% success and reasonable accuracy in rapid time, suitable for an online system. In addition, the proposed method is evaluated systematically with regard to several practical situations caused by the floating platform, and it demonstrates good robustness to limited scanning time and noise.
Publication
IEEE Transactions on Geoscience and Remote Sensing