A flexible calibration method with multi-stage optimization for the axial error of mobile mapping systems
Apr 1, 2023·
 ,
,
,
,
,
,
,
·
0 min read
,
,
,
,
,
,
,
·
0 min read
Ying Jiang
Han Hu
Shuming Si
Yeting Zhang
Jie Chen
Xiaocui Guo
Yulin Ding
Ruofei Zhong
Qing Zhu
Abstract
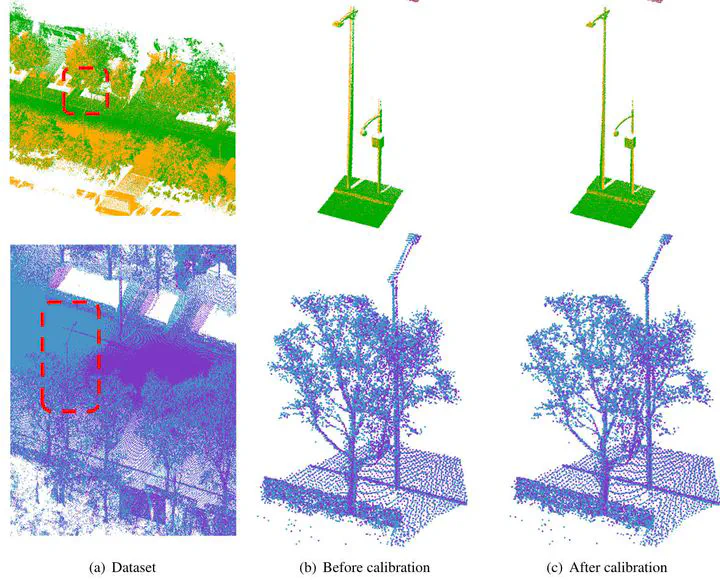
Mobile mapping systems, which are equipped with a laser scanner, panoramic camera, and inertial navigation system, can flexibly and efficiently obtain precision point clouds. However, these systems require re-installation for each mission, which causes displacement errors in the instruments, resulting in discrepancies between multiple collections of data. The existing calibration methods usually require additional control targets settled in a managed field survey. Furthermore, the point clouds obtained with mobile mapping systems do not follow the common assumption of rigid transformation. To alleviate the above problems, we propose a flexible in-situ calibration method that only requires data collected in a round-trip survey pattern and conducts a self-calibration of the placement parameters with meticulously designed exact point matching. Specifically, because the accuracy of the existing feature-based registration method is not sufficient to acquire the exact correspondences of point clouds and to prune the outliers in correspondence searching. We propose novel pruning and refining approaches to obtain exact point-to-point correspondences between the round-trip point clouds. From systematic analyses of the coupling between different factors, we then construct a simplified error model that takes into account the a priori rotation- and translation-weighted observations. Finally, to alleviate the correlation effects between different parameters, we decouple the least-squares solver into several stages and obtain robust self-calibration parameters. Surveying experiments show that the flexible calibration method proposed in this paper is both effective and feasible in improving the accuracy of point clouds in overlapping areas, and can reduce the inconsistency of the calibrated point clouds by 37.02%.
Publication
International Journal of Applied Earth Observation and Geoinformation