Multiscale Feature Fusion for the Multistage Denoising of Airborne Single Photon LiDAR
Feb 3, 2023·
 ,
,
,
,
,
,
,
,
·
0 min read
,
,
,
,
,
,
,
,
·
0 min read
Shuming Si
Han Hu
Yulin Ding
Xuekun Yuan
Ying Jiang
Yigao Jin
Xuming Ge
Yeting Zhang
Jie Chen
Xiaocui Guo
Abstract
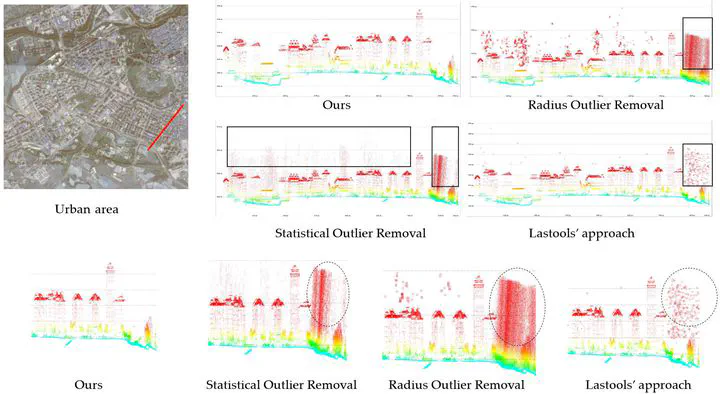
Compared with the existing modes of LiDAR, single-photon LiDAR (SPL) can acquire terrain data more efficiently. However, influenced by the photon-sensitive detectors, the collected point cloud data contain a large number of noisy points. Most of the existing denoising techniques are based on the sparsity assumption of point cloud noise, which does not hold for SPL point clouds, so the existing denoising methods cannot effectively remove the noisy points from SPL point clouds. To solve the above problems, we proposed a novel multistage denoising strategy with fused multiscale features. The multiscale features were fused to enrich contextual information of the point cloud at different scales. In addition, we utilized multistage denoising to solve the problem that a single-round denoising could not effectively remove enough noise points in some areas. Interestingly, the multiscale features also prevent an increase in false-alarm ratio during multistage denoising. The experimental results indicate that the proposed denoising approach achieved 97.58%, 99.59%, 95.70%, and 77.92% F1-scores in the urban, suburban, mountain, and water areas, respectively, and it outperformed the existing denoising methods such as Statistical Outlier Removal. The proposed approach significantly improved the denoising precision of airborne point clouds from single-photon LiDAR, especially in water areas and dense urban areas.
Publication
Remote Sensing