IMU-Centric to LiDAR-Centric Decoupled Multi-Stage Extrinsic Calibration of Repetitive Scanning LiDARs in Mobile Mapping Systems
Ying Jiang, Han Hu*, Jiahao Zhou, Qiang Wang, Pengxin Gu, Zhaoxuan Zhou, Qing Zhu
Faculty of Geosciences and Engineering, Southwest Jiaotong University, Chengdu, China
preprint · 2026
Abstract
Extrinsic calibration of commercial-grade repetitive-scanning LiDARs remains challenging because their fixed and sparse scan patterns provide weak geometric constraints for direct registration in multi-LiDAR mobile mapping systems (MMS). Although accumulating scans along a moving trajectory can reveal richer structures, the accumulation process itself depends on accurate extrinsics; poor initialization can introduce motion distortion and structural blurring, creating a circular dependency between accumulation quality and calibration accuracy.
This project presents a multi-stage extrinsic calibration framework that resolves this dependency by combining inertial trajectory constraints with accumulated geometric evidence. The method first estimates coarse extrinsics from the rigid-body relationship between the LiDAR-integrated IMUs and a reference IMU, providing reliable initial values for motion-compensated multi-frame aggregation without relying on sparse LiDAR geometry. A factor-graph averaged multiway-registration prior is then constructed to initialize geometric refinement, after which the extrinsics are further optimized using inter-LiDAR consistency and correspondences to a global reference point cloud. Experiments on a four-LiDAR mobile mapping system show that the method improves calibration accuracy, preserves stable extrinsics across scenes, and produces more coherent fused point clouds than existing baselines.
Motivation
Degenerate Single-Frame Geometry of Repetitive-Scanning LiDARs
Unlike non-repetitive LiDARs, which progressively accumulate denser surface coverage over time, repetitive-scanning LiDARs repeatedly sample fixed angular directions, yielding sparse, slice-like observations in each frame. Even with a reasonable initial alignment, these single-frame measurements provide insufficient geometric constraints for reliable inter-LiDAR registration, causing the optimizer to converge to a physically implausible local minimum.
Accumulation–Calibration Interdependency
Multi-frame accumulation can enrich local geometry for calibration, but the accumulation process itself relies on the LiDAR extrinsics. When the initial extrinsics are inaccurate, the accumulated point cloud exhibits structural duplication, frame misalignment, and blurred structural boundaries. This creates an interdependency: reliable accumulation requires accurate extrinsics, yet accurate calibration depends on geometrically informative accumulated point clouds.
Experimental Platform
The experimental system integrates four repetitive-scanning LiDARs, onboard IMUs, a reference IMU, and a custom synchronization and acquisition board for vehicle-mounted mobile mapping. The vehicle-mounted system can efficiently collect scene-scale point clouds with broad coverage.
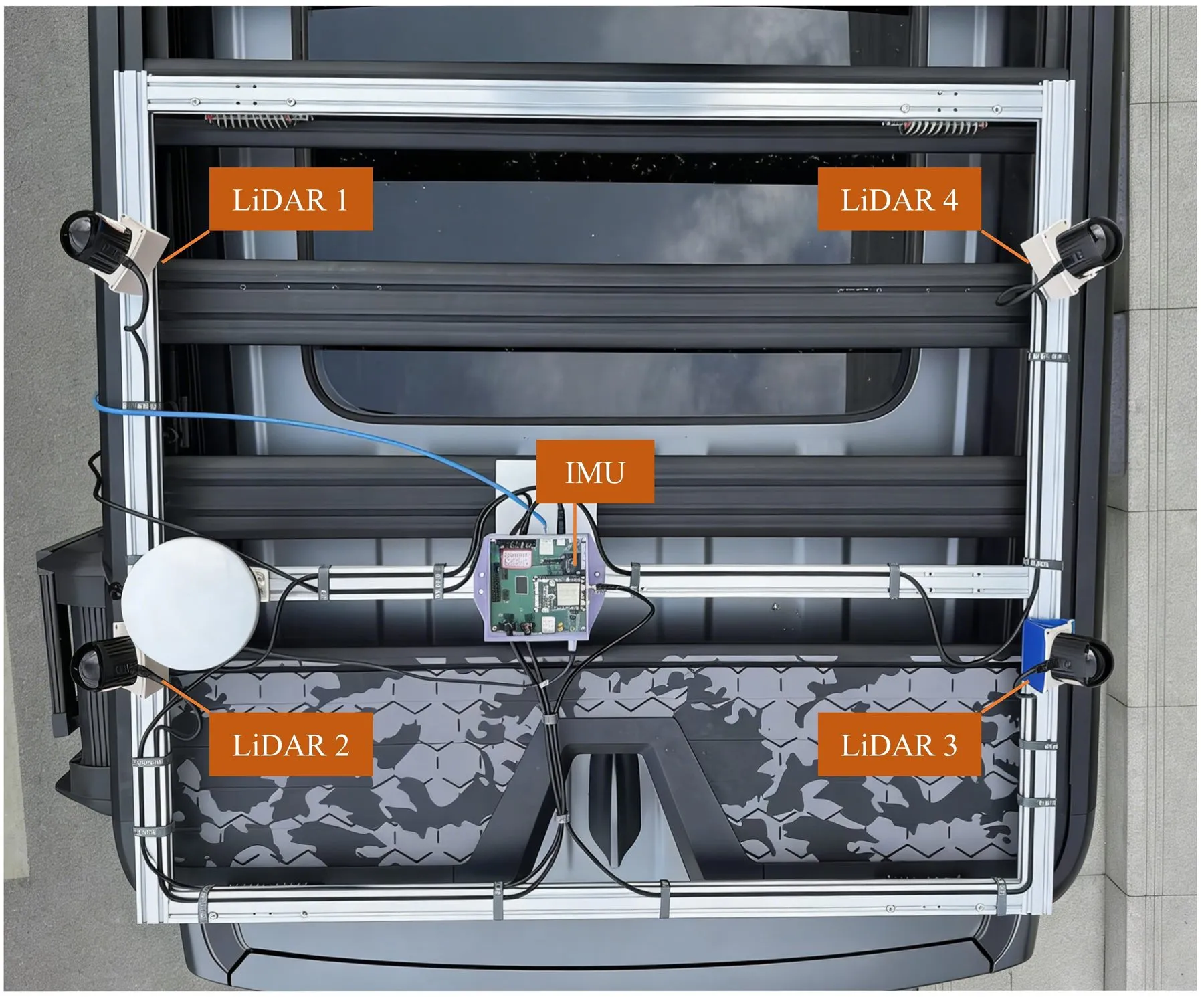

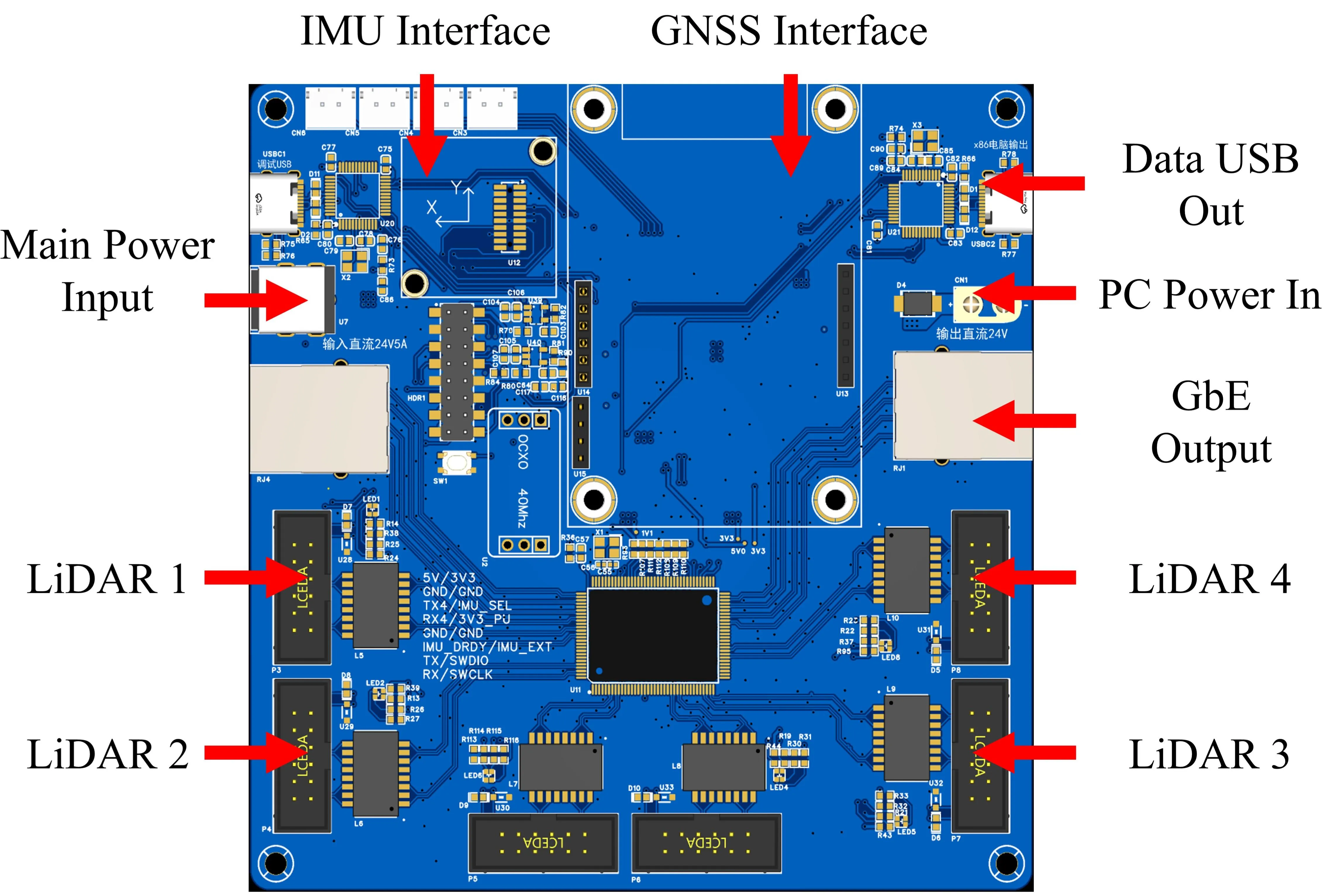
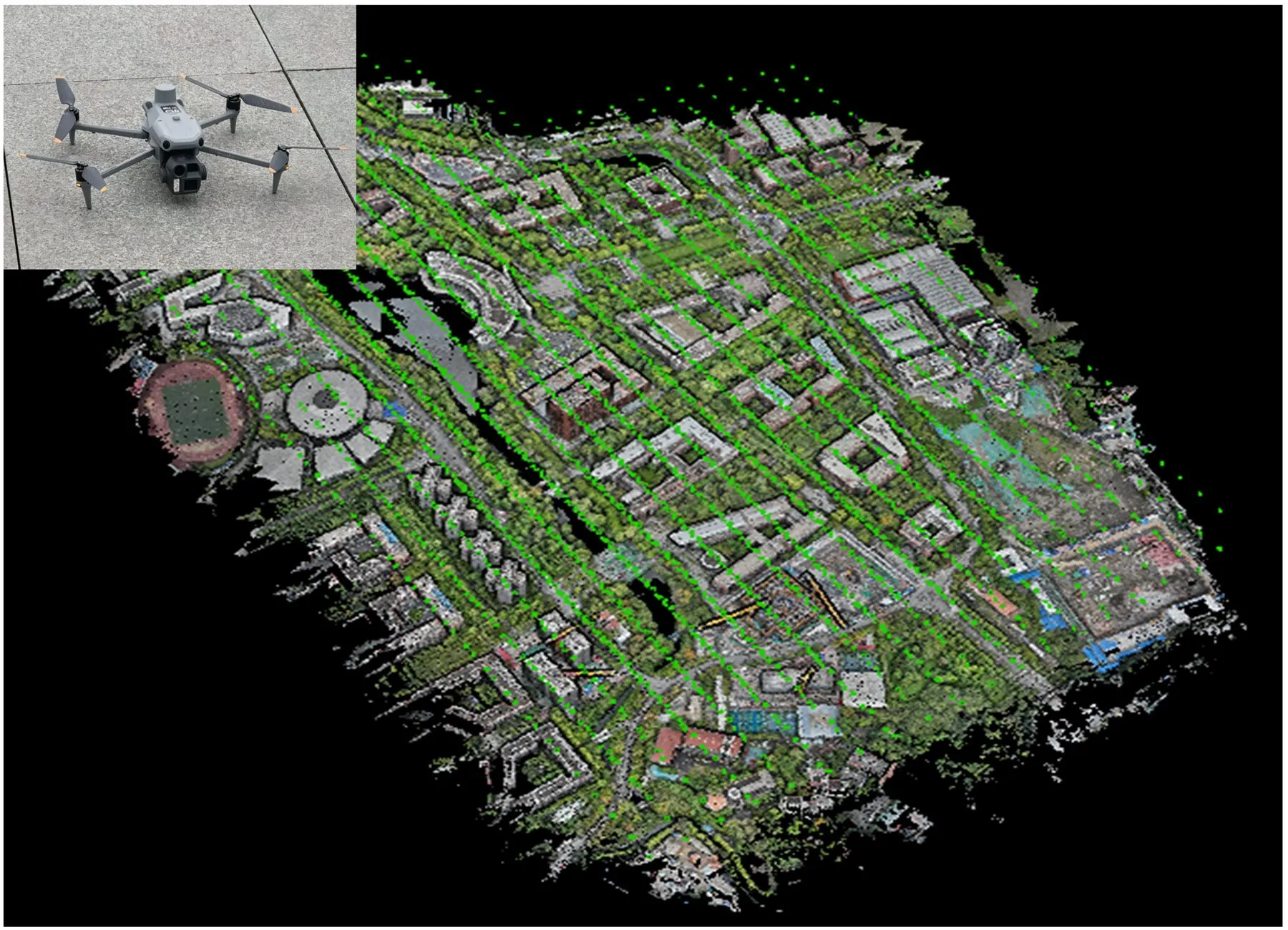
Experimental platforms and hardware used in MMSCal, including the vehicle-mounted multi-LiDAR MMS, synchronization and acquisition board, and scene-scale mapping platform.
Results
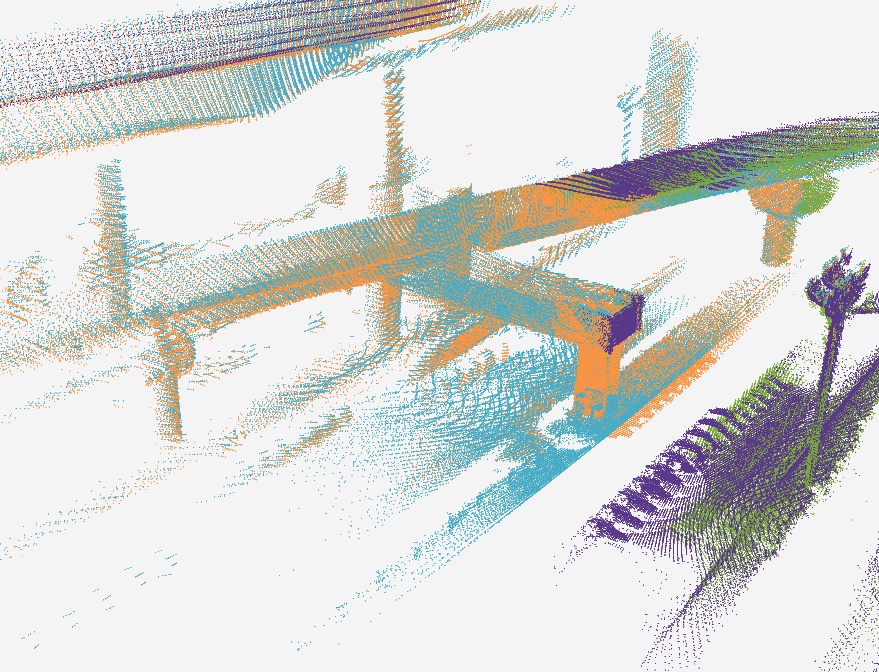
The visualizations below compare calibration quality across methods and test scenes. Use the scene tab to switch between the three-way method comparison, the before/after scene slider to inspect geometric refinement on individual scenes, and the angular velocity profiles at the bottom to verify temporal and rotational alignment across IMUs.
Calibration Method Comparison
Three-way method comparison on a representative scene.
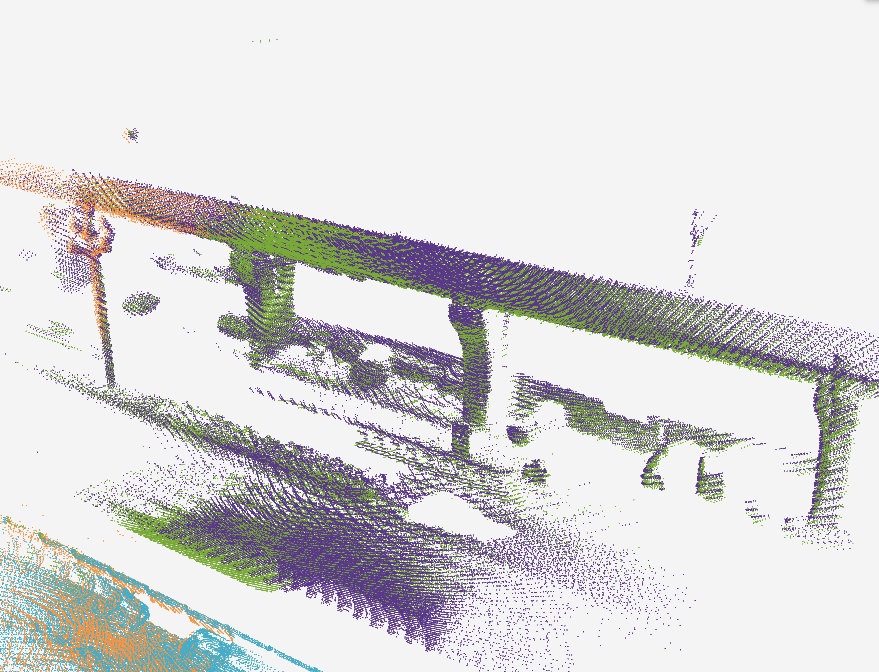
Calibration refinement on the circular trajectory scene.
Refinement on the outschool trajectory scene.
Refinement on the straight-line trajectory scene.
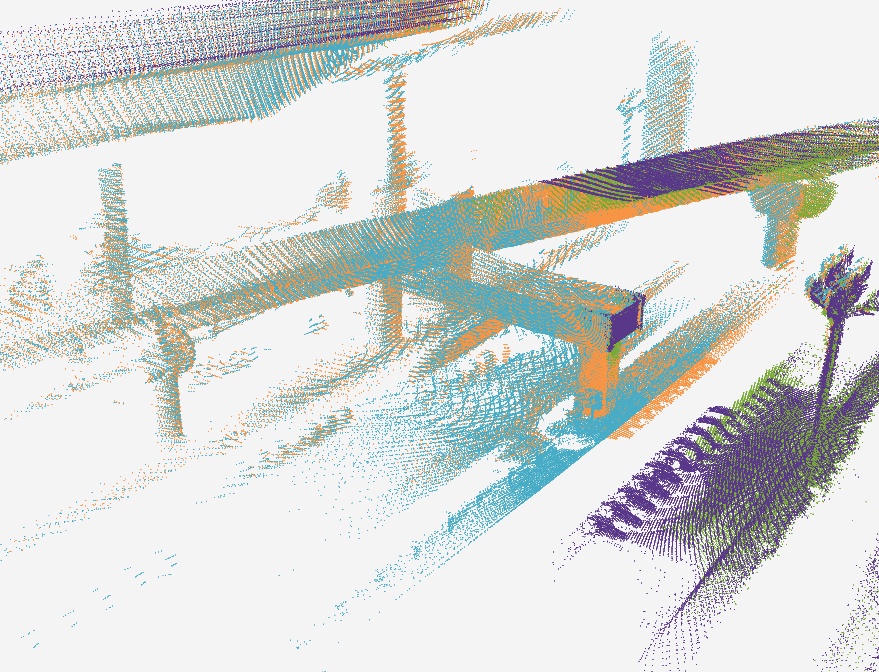
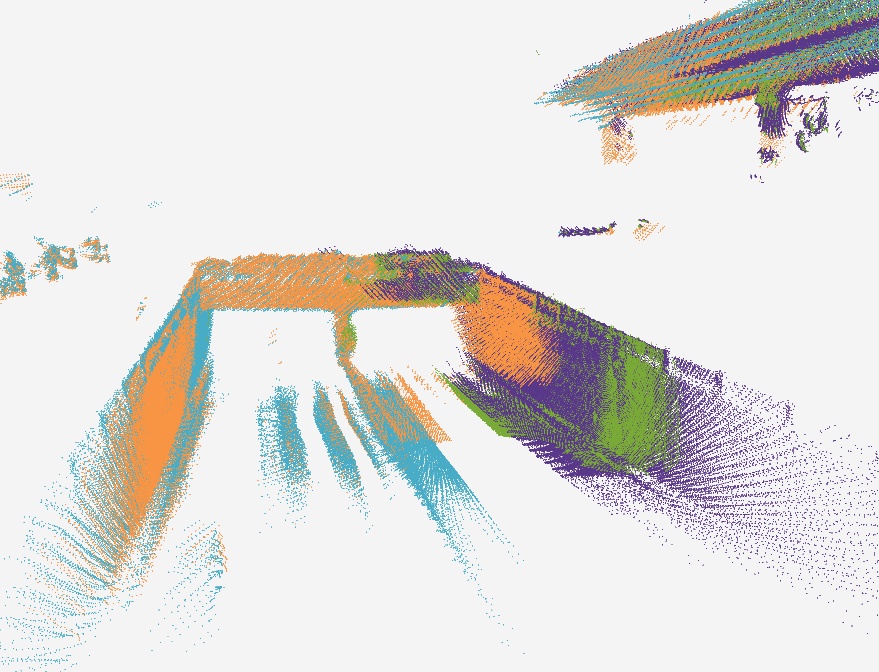
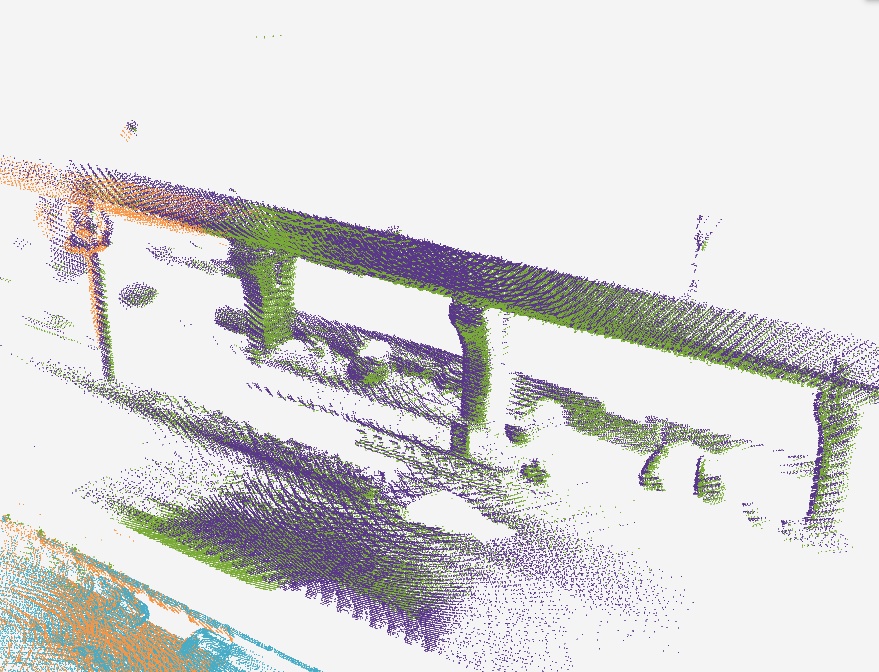
Scene Comparisons
The before/after sliders below show how the multi-stage framework repairs the geometric misalignment visible after the IMU-centric initialization. Drag the handle to compare.
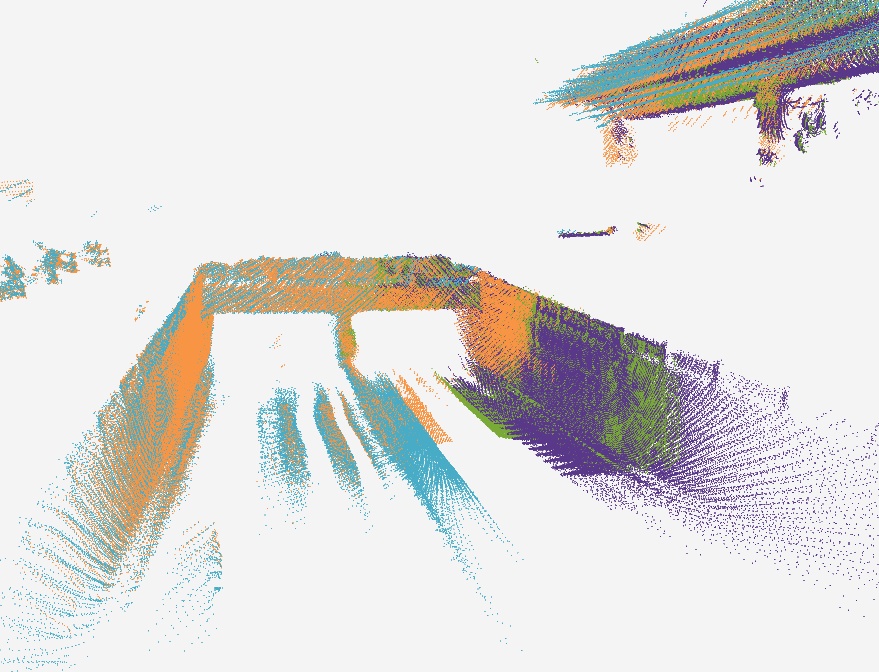
IMU-centric Calibration
The profiles below show angular velocity consistency after IMU-centric initialization. The LiDAR-integrated IMUs are transformed into the reference IMU frame using the estimated temporal offsets and rotational extrinsics. The three axes are shown over the same time window, and the close agreement of the angular velocity curves validates the temporal and rotational alignment.
BibTeX
@article{jiang2026mmscal,
title={IMU-Centric to LiDAR-Centric Decoupled Multi-Stage Extrinsic Calibration of Repetitive Scanning LiDARs in Mobile Mapping Systems},
author={Jiang, Ying and Hu, Han and Zhou, Jiahao and Wang, Qiang and Gu, Pengxin and Zhou, Zhaoxuan and Zhu, Qing},
year={2026},
}